Lecture 03-04 Transformation¶
2D 线性变换¶
- 线性变换:变换能够用矩阵乘法得到
可以说,Linear Transformation = Matrices (of the same dimension)
我们将如下所示的简单矩阵乘法定义为对向量 \((x, y)^{T}\) 的线性变换。
\[
\left[\begin{array}{ll}
a_{11} & a_{12} \\
a_{21} & a_{22}
\end{array}\right]\left[\begin{array}{l}
x \\
y
\end{array}\right]=\left[\begin{array}{l}
a_{11} x+a_{12} y \\
a_{21} x+a_{22} y
\end{array}\right]
\]
缩放 (scale)¶
缩放变换是一种沿着坐标轴作用的变换,定义如下:
\[
\operatorname{scale}\left(s_{x}, s_{y}\right)=\left[\begin{array}{cc}
s_{x} & 0 \\
0 & s_{y}
\end{array}\right]
\]
即除了 \((0,0)^{T}\) 保持不变之外,所有的点变为 \(\left(s_{x} x, s_{y} y\right)^{T}\)
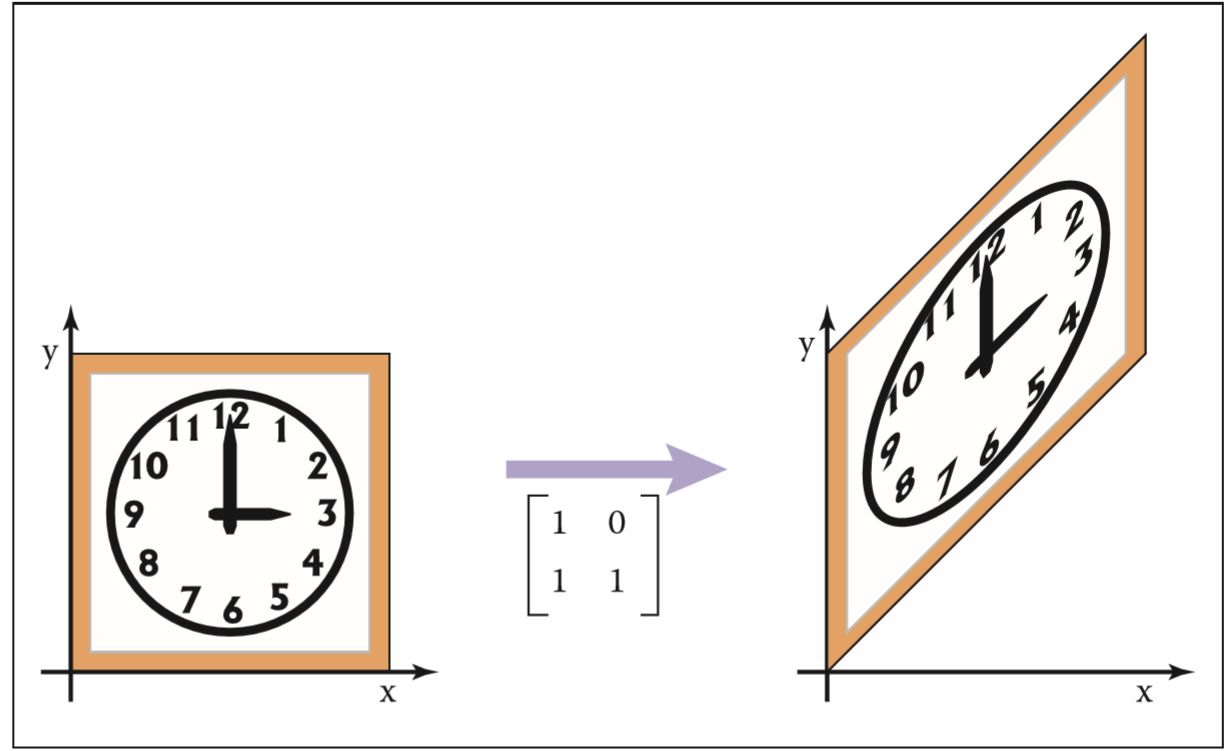
剪切 (shearing)¶
shear 变换直观理解就是把物体一边固定,然后拉另外一边,定义如下:
\[
shear-x(s)=\left[\begin{array}{ll}1 & s \\ 0 & 1\end{array}\right], \\shear-y (s)=\left[\begin{array}{ll}1 & 0 \\ s & 1\end{array}\right]
\]
- 拉向 \(x\) 轴
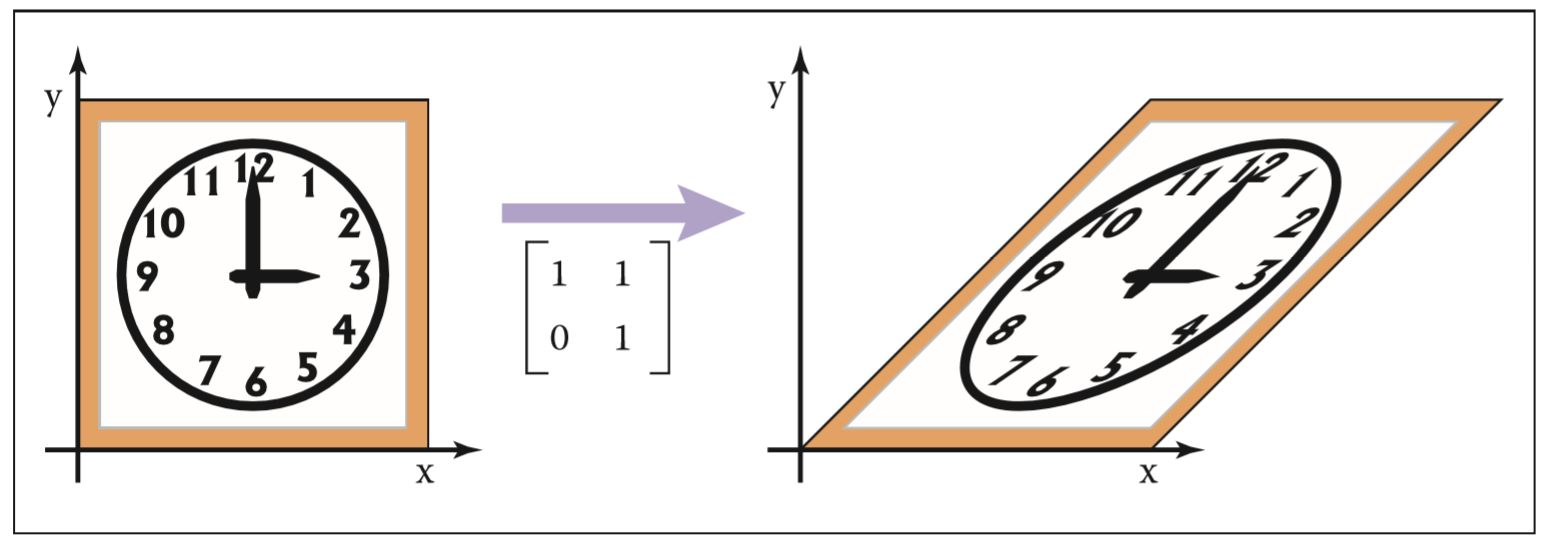
- 拉向 \(y\) 轴
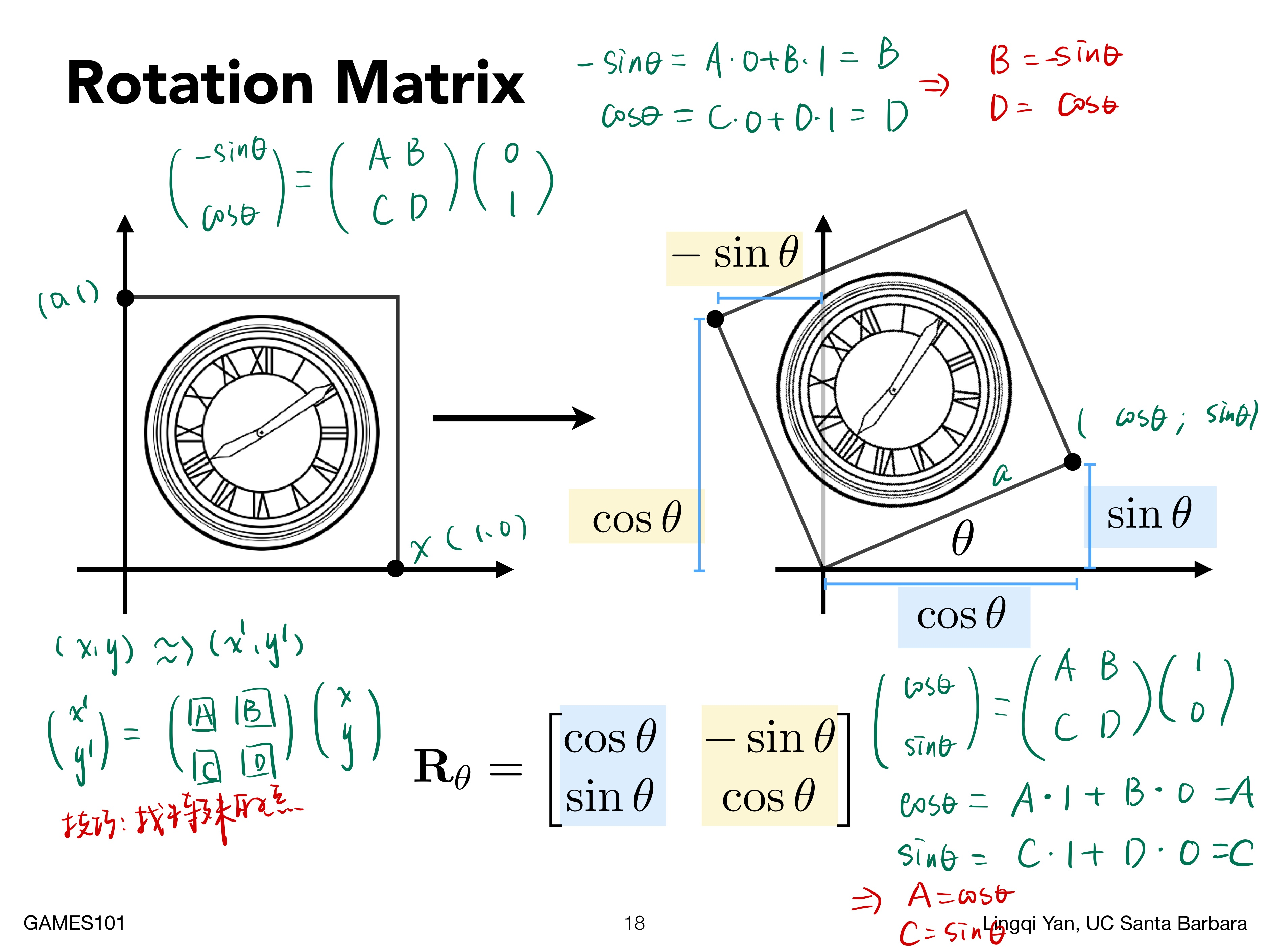
旋转 (rotation)¶
- 在无特殊说明的情况下,默认关于 \((0,0)\) 点,逆时针方向旋转 \(\theta\) 角度(弧度)的公式如下
\[
\mathbf{R}_{\theta}=\left[\begin{array}{cc}
\cos \theta & -\sin \theta \\
\sin \theta & \cos \theta
\end{array}\right]
\]
推导如下
齐次坐标¶
- 以上的线性变换矩阵不能描述平移变换,为了统一平移变换和线性变换(以上三种变换),引入平移变换
定义 2D 坐标和 2D向量如下
- 2D 坐标:\((x,y,1)^T\)
- 2D 向量:\((x,y,0)^T\)
- 由于向量具有平移不变性,第3维的0保护了向量不会因为平移而改变
齐次坐标下向量和点的操作¶
-
vector + vector = vector
-
point – point = vector
-
point + vector = point (一个点沿着向量移动)
-
point + point = 两个点的中点
此外,当第三维为 \(w(w\ne 0)\)时,定义
\[
\left(\begin{array}{c}
x \\
y \\
w
\end{array}\right) \text { is the } 2 \mathrm{D} \text { point }\left(\begin{array}{c}
x / w \\
y / w \\
1
\end{array}\right), w \neq 0
\]
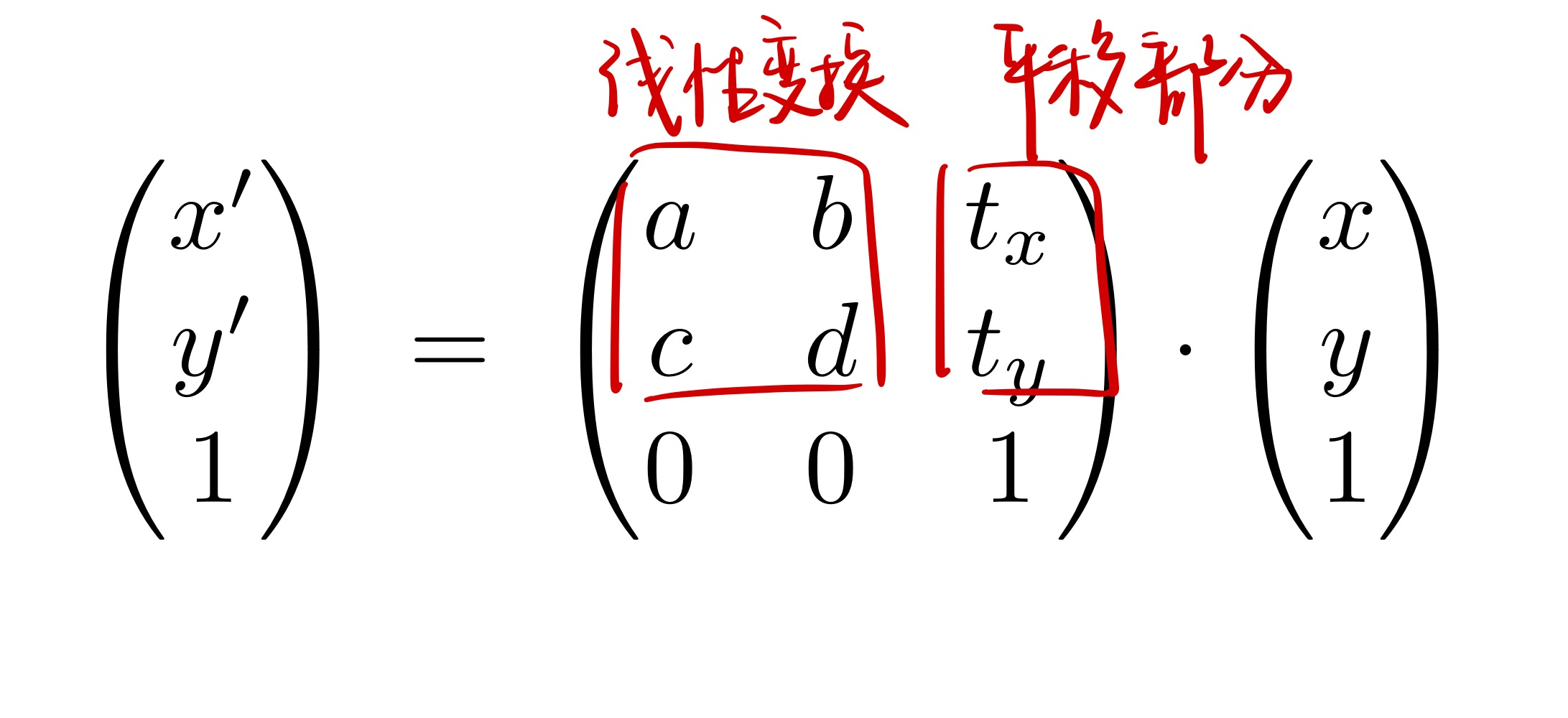
仿射变换¶
- 仿射变换使用一个矩阵统一了所有操作
- 先应用线性变换再应用平移变换
仿射变换下 2D 变换的描述¶
Scale¶
\[
\mathbf{S}\left(s_{x}, s_{y}\right)=\left(\begin{array}{ccc}
s_{x} & 0 & 0 \\
0 & s_{y} & 0 \\
0 & 0 & 1
\end{array}\right)
\]
Rotation¶
\[
\mathbf{R}(\alpha)=\left(\begin{array}{ccc}
\cos \alpha & -\sin \alpha & 0 \\
\sin \alpha & \cos \alpha & 0 \\
0 & 0 & 1
\end{array}\right)
\]
Translation¶
\[
\mathbf{T}\left(t_{x}, t_{y}\right)=\left(\begin{array}{ccc}
1 & 0 & t_{x} \\
0 & 1 & t_{y} \\
0 & 0 & 1
\end{array}\right)
\]
逆变换¶
- 使用逆矩阵
- \(\mathbf{M}^{-1}\) is the inverse of transform \(\mathbf{M}\) in both a matrix and geometric sense

复合变换¶
- 复杂变换可由简单变换得到
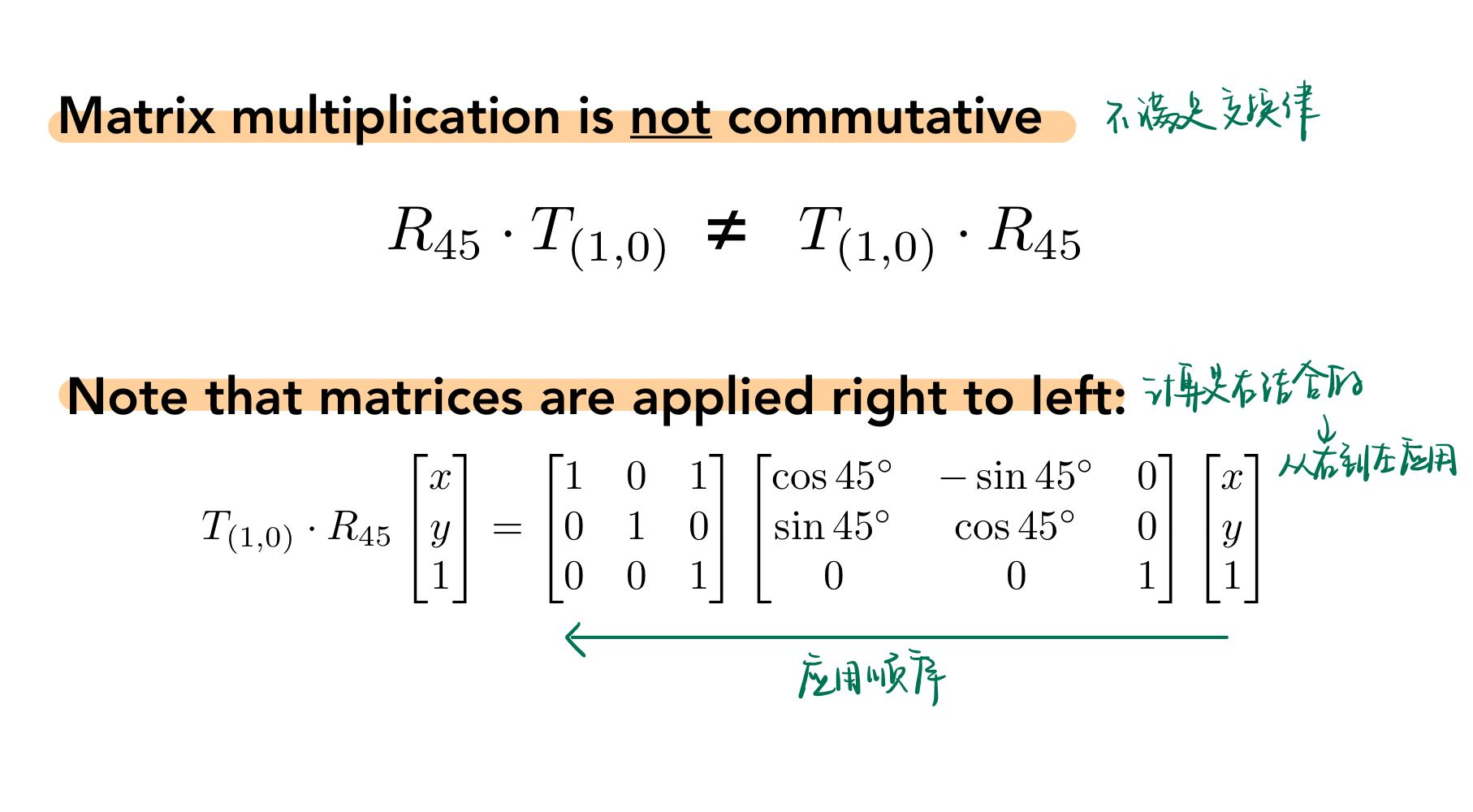
- 变换的顺序非常重要,如先旋转再平移和先平移再旋转得到的结果不同
- 矩阵变换不满足交换律
- 计算是右结合的
3D 线性变换¶
再次使用齐次坐标描述
- 3D point \(=(x, y, z, 1)^{T}\)
- 3D vector \(=(x, y, z, 0)^{T}\)
- In general, \((x, y, z, w)(w \ne0)\) is the 3D point: \((x / w, y / w, z / w)\)
- e.g. \((1, 0, 0, 1)\) and \((2, 0, 0, 2)\) both represent \((1, 0, 0)\)
- 先应用线性变换再应用平移变换
Use \(4 \times 4\) matrices for affine transformations
\[
\left(\begin{array}{l}
x^{\prime} \\
y^{\prime} \\
z^{\prime} \\
1
\end{array}\right)=\left(\begin{array}{lllc}
a & b & c & t_{x} \\
d & e & f & t_{y} \\
g & h & i & t_{z} \\
0 & 0 & 0 & 1
\end{array}\right) \cdot\left(\begin{array}{l}
x \\
y \\
z \\
1
\end{array}\right)
\]
Scale¶
\[
\mathbf{S}\left(s_{x}, s_{y}, s_{z}\right)=\left(\begin{array}{cccc}
s_{x} & 0 & 0 & 0 \\
0 & s_{y} & 0 & 0 \\
0 & 0 & s_{z} & 0 \\
0 & 0 & 0 & 1
\end{array}\right)
\]
Translation¶
\[
\mathbf{T}\left(t_{x}, t_{y}, t_{z}\right)=\left(\begin{array}{cccc}
1 & 0 & 0 & t_{x} \\
0 & 1 & 0 & t_{y} \\
0 & 0 & 1 & t_{z} \\
0 & 0 & 0 & 1
\end{array}\right)
\]
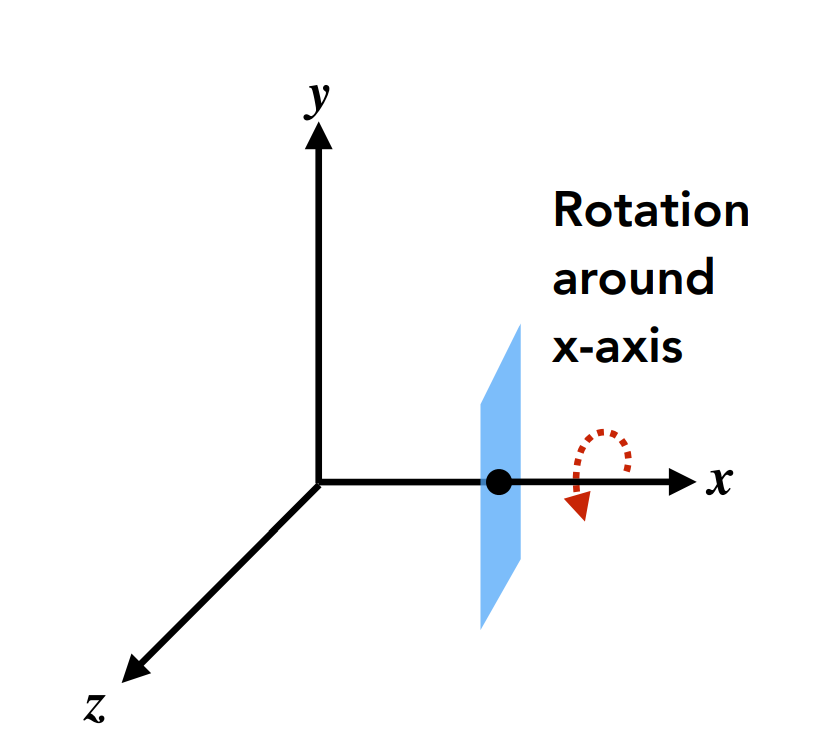
? Rotation¶
-
around \(x-, y-\), or \(z\)-axis
-
\(\sin \alpha\) 的正负号由右手定则确定,顺序是 \(x\to z\)
\[
\begin{aligned}
\mathbf{R}_{x}(\alpha) &=\left(\begin{array}{cccc}
1 & 0 & 0 & 0 \\
0 & \cos \alpha & -\sin \alpha & 0 \\
0 & \sin \alpha & \cos \alpha & 0 \\
0 & 0 & 0 & 1
\end{array}\right) \\
\mathbf{R}_{y}(\alpha) &=\left(\begin{array}{cccc}
\cos \alpha & 0 & \sin \alpha & 0 \\
0 & 1 & 0 & 0 \\
-\sin \alpha & 0 & \cos \alpha & 0 \\
0 & 0 & 0 & 1
\end{array}\right) \\
\mathbf{R}_{z}(\alpha) &=\left(\begin{array}{cccc}
\cos \alpha & -\sin \alpha & 0 & 0 \\
\sin \alpha & \cos \alpha & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{array}\right)
\end{aligned}
\]
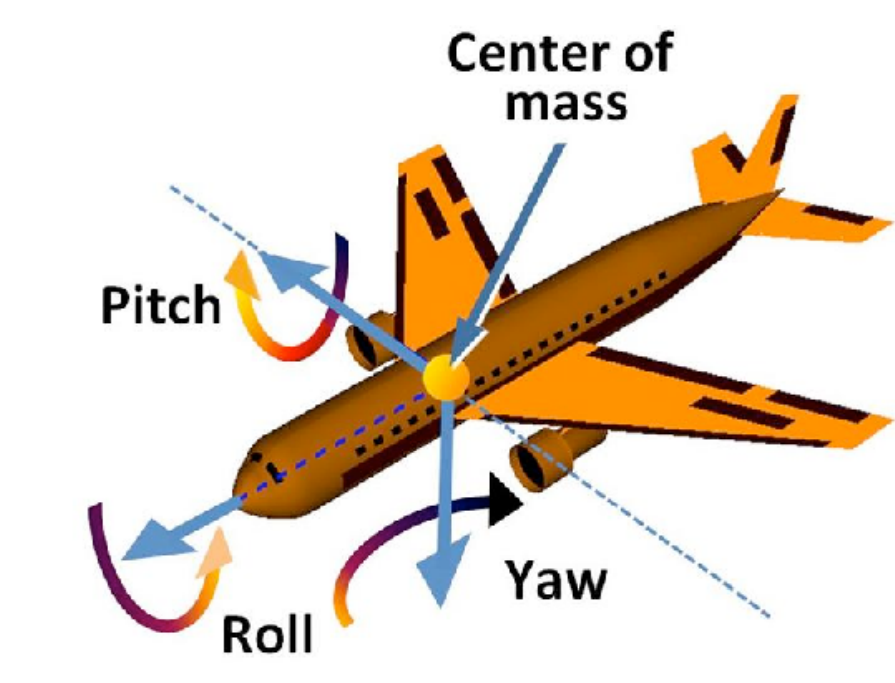
- 所有的 3D 变换都可以被描述为在 \(x,y,z\) 轴上的旋转
- 也叫欧拉角
- Often used in flight simulators: roll, pitch, yaw
\[
\mathbf{R}_{x y z}(\alpha, \beta, \gamma)=\mathbf{R}_{x}(\alpha) \mathbf{R}_{y}(\beta) \mathbf{R}_{z}(\gamma)
\]
Rodrigues’ Rotation Formula¶
Rotation by angle \(\alpha\) around axis \(n\)
\[
\mathbf{R}(\mathbf{n}, \alpha)=\cos (\alpha) \mathbf{I}+(1-\cos (\alpha)) \mathbf{n} \mathbf{n}^{T}+\sin (\alpha) \underbrace{\left(\begin{array}{ccc}
0 & -n_{z} & n_{y} \\
n_{z} & 0 & -n_{x} \\
-n_{y} & n_{x} & 0
\end{array}\right)}_{\mathbf{N}}
\]
View / Camera Transformation¶
Think about how to take a photo
- Find a good place and arrange people (model transformation)
- Find a good “angle” to put the camera (view transformation)
- Cheese! (projection transformation 将三维空间投影到二维视图上)
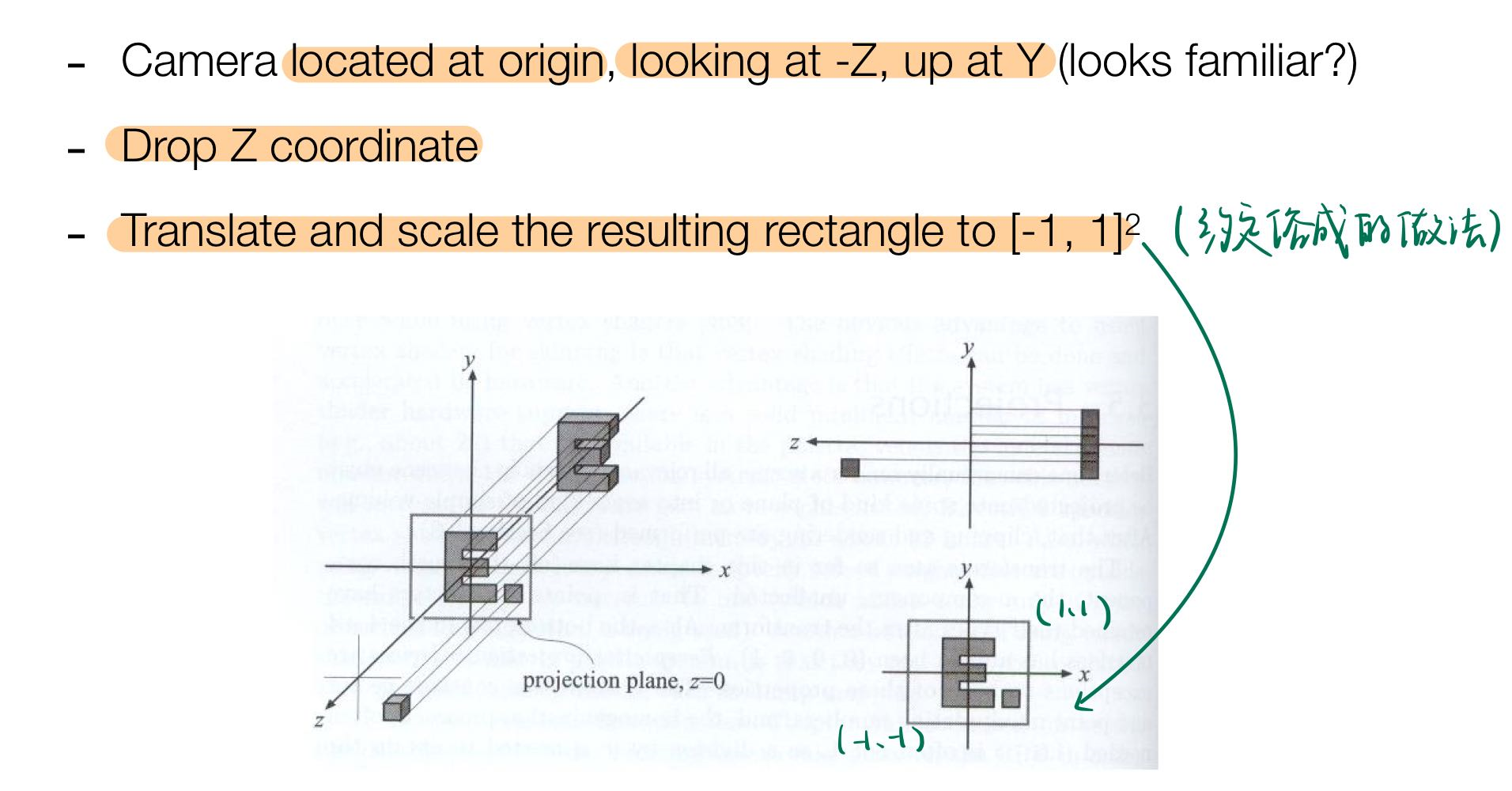
Projection transformation¶
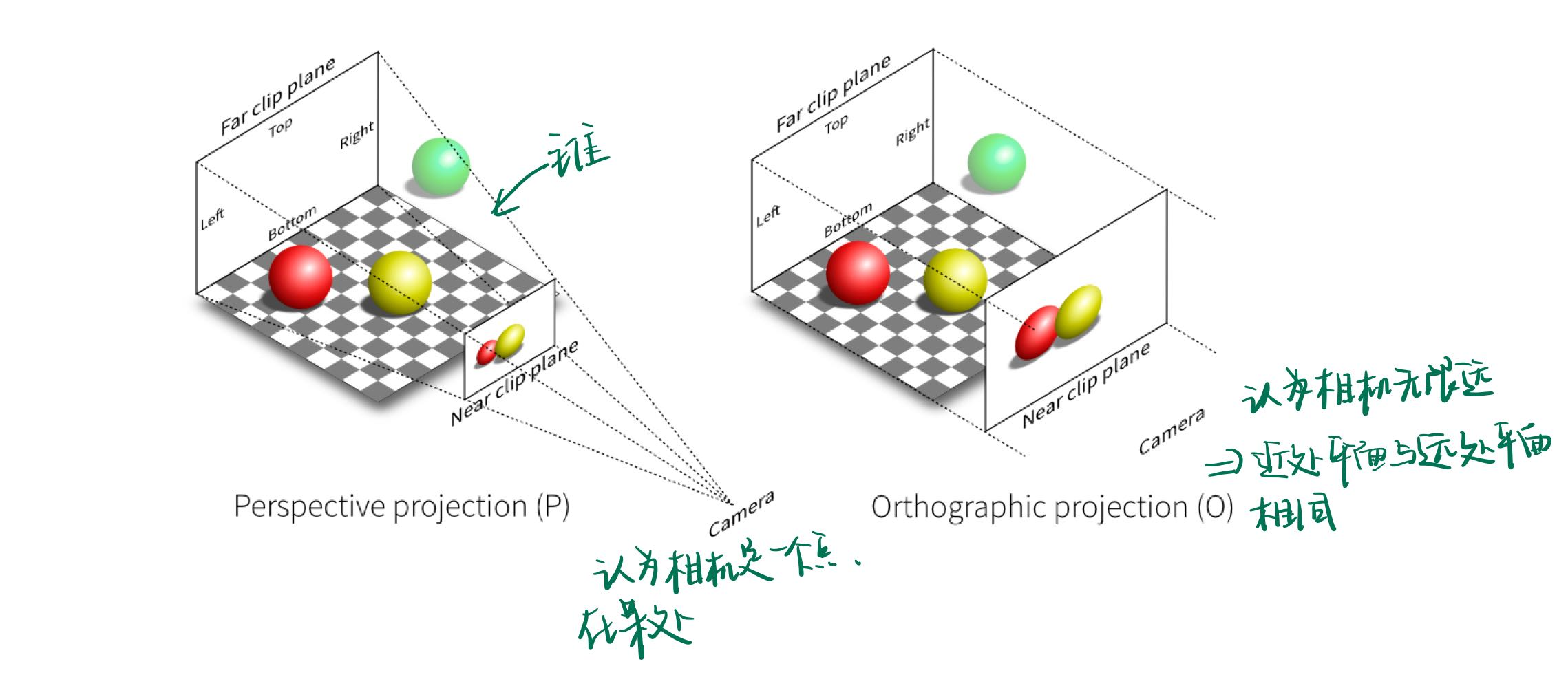
Orthographic projection¶
正则投影的步骤¶
正则立方体¶
- map a cuboid \([l, r] \times [b, t] \times [f, n]\) to the “canonical (正则、规范、标准)” cube \([-1, 1]^3\)
- 因为是朝着 \(z\) 轴负方向看,所以坐标小的是更远的 \(f\) ,坐标大的是更近的 \(n\)
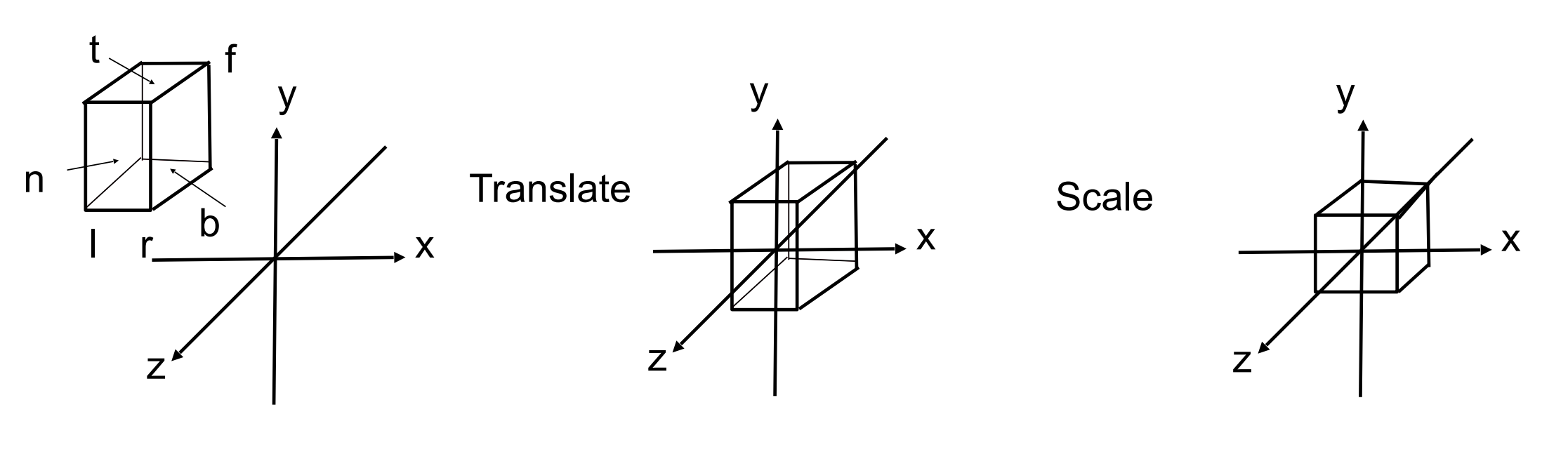
正则投影的变换矩阵¶
Translate (center to origin) first, then scale (length/width/height to 2)
\[
M_{\text {ortho }}=\left[\begin{array}{cccc}
\frac{2}{r-l} & 0 & 0 & 0 \\
0 & \frac{2}{t-b} & 0 & 0 \\
0 & 0 & \frac{2}{n-f} & 0 \\
0 & 0 & 0 & 1
\end{array}\right]\left[\begin{array}{cccc}
1 & 0 & 0 & -\frac{r+l}{2} \\
0 & 1 & 0 & -\frac{t+b}{2} \\
0 & 0 & 1 & -\frac{n+f}{2} \\
0 & 0 & 0 & 1
\end{array}\right]
\]
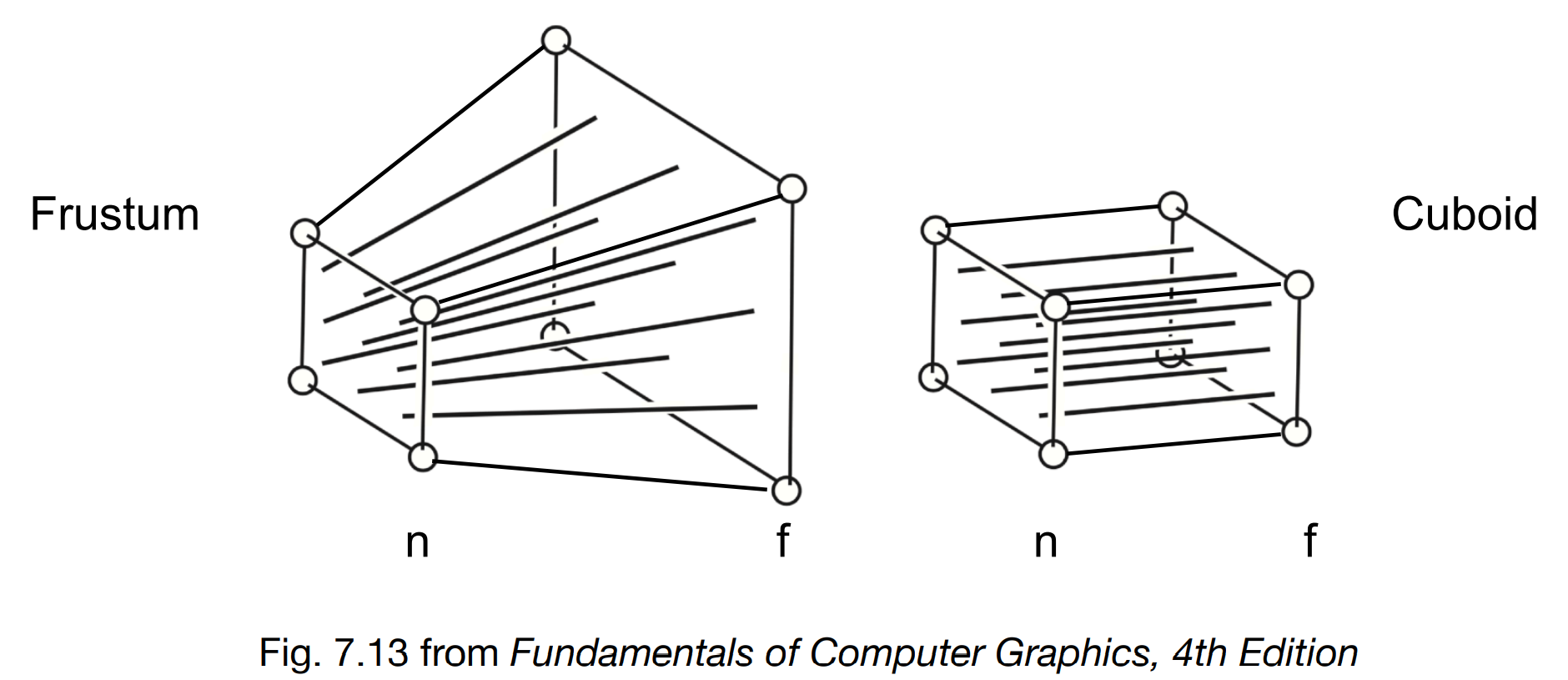
Perspective projection¶
透视投影的步骤¶
- First “squish” the frustum into a cuboid \((n \to n, f \to f) (M_{persp\to ortho})\) (将远平面挤压为与近平面相同的大小)
- 挤压规则
- 近平面永远不变,任何点在近平面上不变
- 远平面 \(z\) 值不变,任何远平面上的点 \(z\) 值不变
- 远平面的中心不变
- Do orthographic projection (\(M_{ortho}\)) (做正则投影)
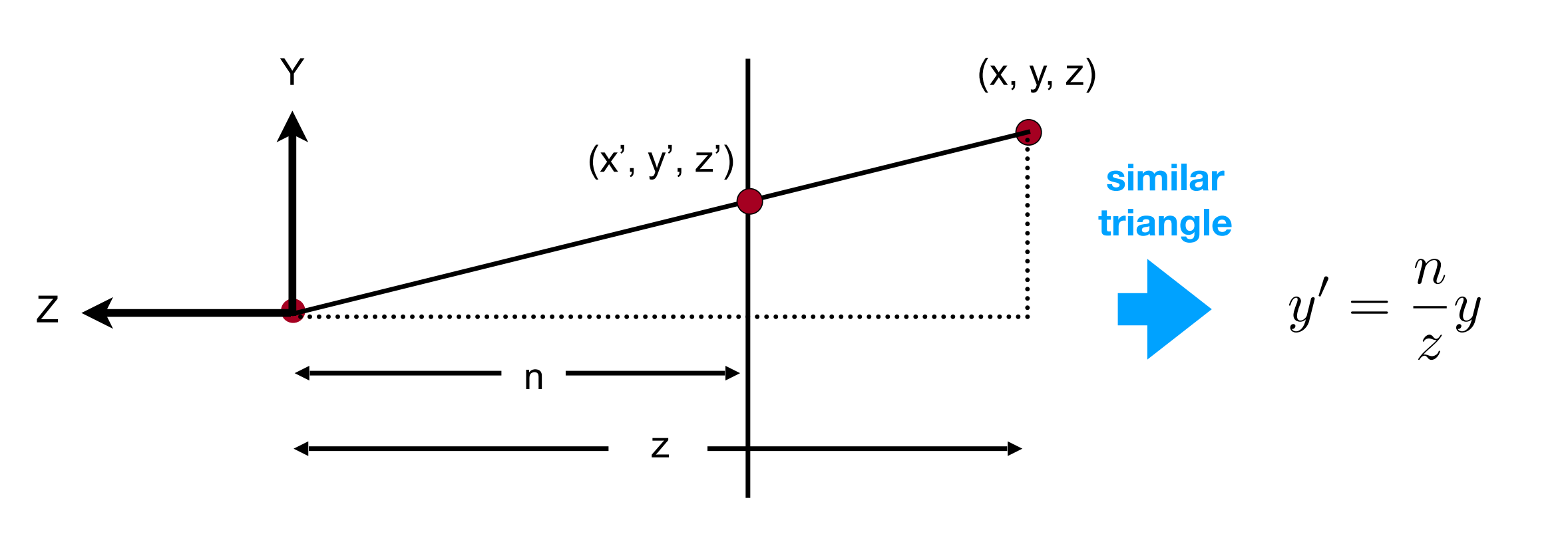
透视投影的变换矩阵推导¶
计算机图形学二:视图变换(坐标系转化,正交投影,透视投影,视口变换)
透视投影的变换矩阵¶
\[
\mathrm{M}_{\text {per }}=\mathrm{M}_{\text {ortho }} \mathrm{M}_{\text {persp } \rightarrow\text { ortho }}
$$
$$
\mathrm{M}_{\text {per }}=\left[\begin{array}{cccc}
\frac{2}{r-l} & 0 & 0 & 0 \\
0 & \frac{2}{t-b} & 0 & 0 \\
0 & 0 & \frac{2}{n-f} & 0 \\
0 & 0 & 0 & 1
\end{array}\right]\left[\begin{array}{cccc}
1 & 0 & 0 & -\frac{r+l}{2} \\
0 & 1 & 0 & -\frac{t+b}{2} \\
0 & 0 & 1 & -\frac{n+f}{2} \\
0 & 0 & 0 & 1
\end{array}\right]
\left[\begin{array}{cccc}
n & 0 & 0 & 0 \\
0 & n & 0 & 0 \\
0 & 0 & n+f & -f n \\
0 & 0 & 1 & 0
\end{array}\right]
\]
Last update:
July 30, 2023
Created: June 16, 2023
Created: June 16, 2023