Lecture 02 Review of Linear Algebra¶
点乘¶
图形学中默认使用列向量
- 二维
\[
\vec{a} \cdot \vec{b}=\left(\begin{array}{l}
x_{a} \\
y_{a}
\end{array}\right) \cdot\left(\begin{array}{l}
x_{b} \\
y_{b}
\end{array}\right)=x_{a} x_{b}+y_{a} y_{b}
\]
- 三维
\[
\vec{a} \cdot \vec{b}=\left(\begin{array}{c}
x_{a} \\
y_{a} \\
z_{a}
\end{array}\right) \cdot\left(\begin{array}{l}
x_{b} \\
y_{b} \\
z_{b}
\end{array}\right)=x_{a} x_{b}+y_{a} y_{b}+z_{a} z_{b}
\]
- 作用
- 找到两个向量间的夹角
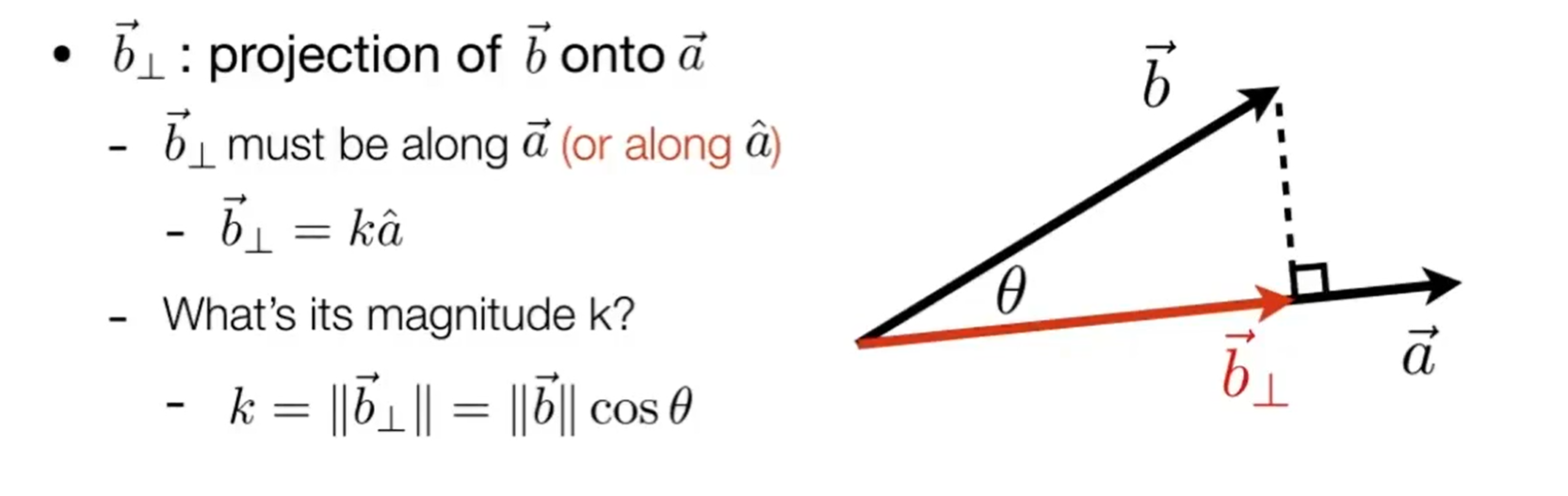
- 找到一个向量在另一个向量上的投影
- 分解向量
- 方向性:根据点乘的值 (\([-1,1]\))
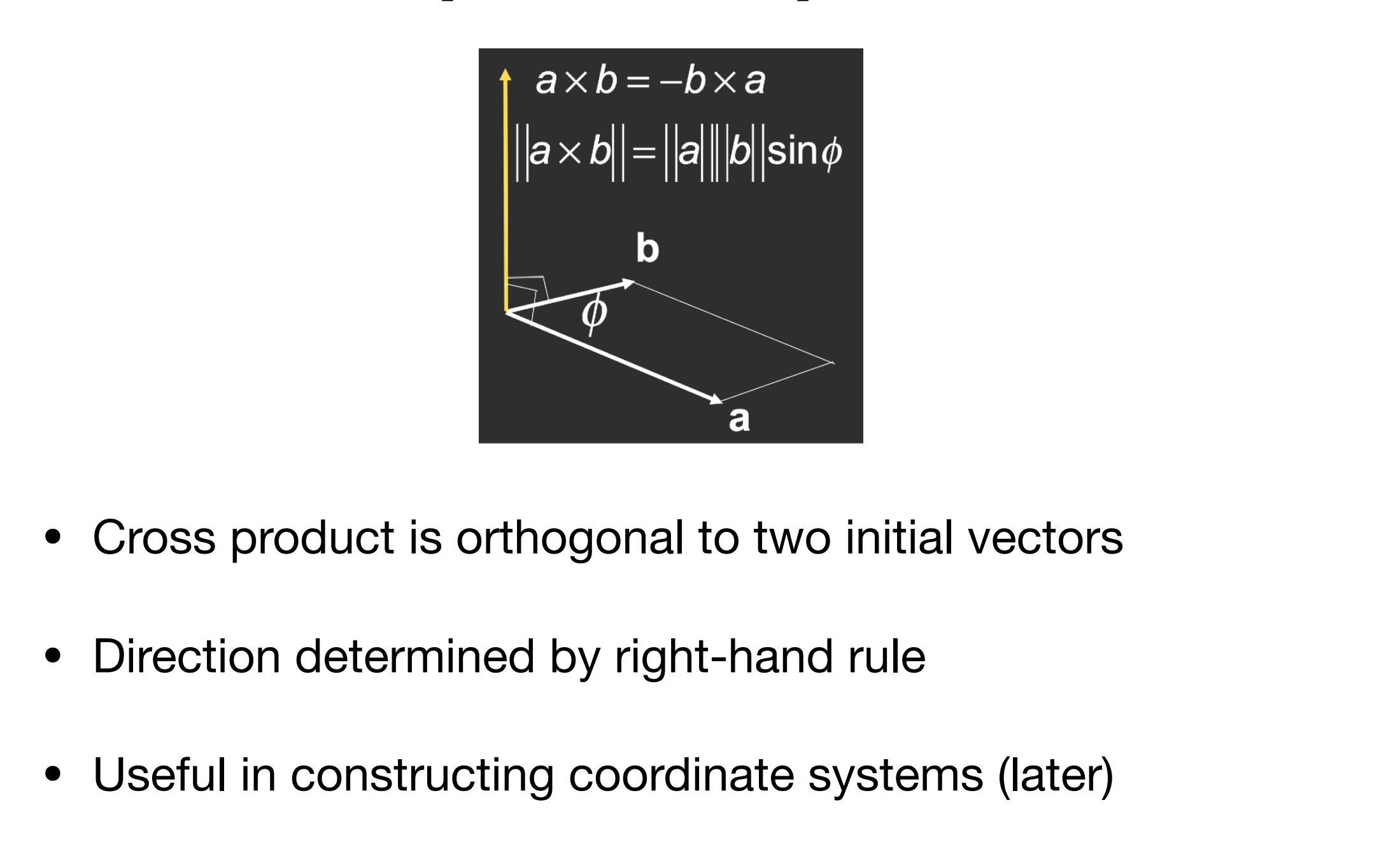
叉积¶
\[
\vec{a} \times \vec{b}=\left(\begin{array}{c}
y_{a} z_{b}-y_{b} z_{a} \\
z_{a} x_{b}-x_{a} z_{b} \\
x_{a} y_{b}-y_{a} x_{b}
\end{array}\right)
\]
- Later in this lecture
\[
\vec{a} \times \vec{b}=A^{*} b=\left(\begin{array}{ccc}
0 & -z_{a} & y_{a} \\
z_{a} & 0 & -x_{a} \\
-y_{a} & x_{a} & 0
\end{array}\right)\left(\begin{array}{l}
x_{b} \\
y_{b} \\
z_{b}
\end{array}\right)
\]
- 作用
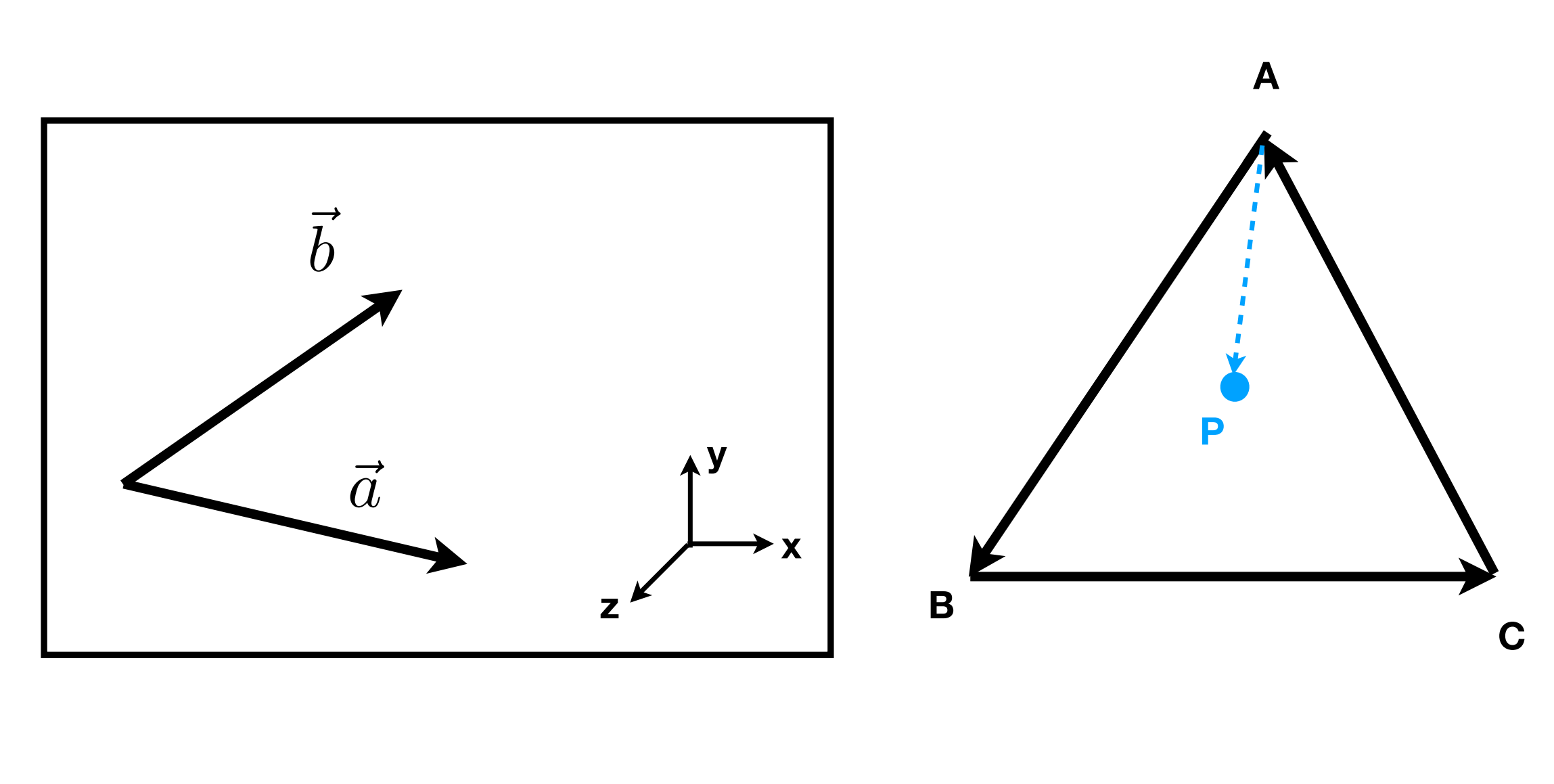
- 判断向量的左右关系:
- 叉积为正在左侧,否则在右侧
- 判断一个点是否在三角形内:\(P\) 点在三条边的同侧(正负号相同)
- Corner Case:结果为0,自己定义在内侧还是外侧
正交坐标系¶
Any set of 3 vectors (in 3D) that
\[
\begin{aligned}
&\|\vec{u}\|=\|\vec{v}\|=\|\vec{w}\|=1 \\
&\vec{u} \cdot \vec{v}=\vec{v} \cdot \vec{w}=\vec{u} \cdot \vec{w}=0 \\
&\vec{w}=\vec{u} \times \vec{v} \quad \text { (right-handed) }
\end{aligned}
\]
- 可以将任意一个向量分析到这三个轴上:投影方法
\[
\vec{p}=(\vec{p} \cdot \vec{u}) \vec{u}+(\vec{p} \cdot \vec{v}) \vec{v}+(\vec{p} \cdot \vec{w}) \vec{w}
\]
矩阵¶
-
矩阵乘法:需要算第几行第几列,就去找第几行第几列,把两个向量点乘起来
-
Element \((i, j)\) in the product is the dot product of row \(i\) from \(A\) and column \(j\) from \(B\)
-
没有交换率
- 有以下规律
- \((AB)C=A(BC)\)
- \(A(B+C) = AB + AC\)
- \((A+B)C = AC + BC\)
- 向量可以当作列矩阵
-
-
矩阵转置
- 交换行和列 \((ij \to ji)\)
- 性质: \((A B)^{T}=B^{T} A^{T}\)
\[
\begin{gathered}
\left(\begin{array}{ll}
1 & 2 \\
3 & 4 \\
5 & 6
\end{array}\right)^{T}=\left(\begin{array}{lll}
1 & 3 & 5 \\
2 & 4 & 6
\end{array}\right) \\
\end{gathered}
\]
-
单位矩阵
-
是一个对角阵,只有对角线上有非0元素
-
来定义矩阵的逆
\[ I_{3 \times 3}=\left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array}\right) \] -
-
矩阵的逆
- \(A A^{-1}=A^{-1} A=I\)
- \((A B)^{-1}=B^{-1} A^{-1}\)
矩阵形式的向量点乘&叉乘操作¶
- Dot product
\[
\begin{aligned}
& \vec{a} \cdot \vec{b}=\vec{a}^{T} \vec{b} \\
=&\left(\begin{array}{lll}
x_{a} & y_{a} & z_{a}
\end{array}\right)\left(\begin{array}{l}
x_{b} \\
y_{b} \\
z_{b}
\end{array}\right)=\left(x_{a} x_{b}+y_{a} y_{b}+z_{a} z_{b}\right)
\end{aligned}
\]
- Cross product
\[
\vec{a} \times \vec{b}=A^{*} b=\left(\begin{array}{ccc}
0 & -z_{a} & y_{a} \\
z_{a} & 0 & -x_{a} \\
-y_{a} & x_{a} & 0
\end{array}\right)\left(\begin{array}{l}
x_{b} \\
y_{b} \\
z_{b}
\end{array}\right)
\]
PS:\(A^*\) :dual matrix of vector \(\vec{a}\)
Last update:
July 30, 2023
Created: June 16, 2023
Created: June 16, 2023